Большинство привычной нам робототехники использует для движения пневматические приспособления или электромоторы. Но гораздо эффективнее было бы разработать конструкцию наподобие мускулатуры. И если подобные технологии для наземных роботов еще далеки от завершения, то реализовать подобную систему для подводных роботов можно уже сейчас. Именно это и сделали инженеры робототехнической компании Festo. Их робот, получивший название BionicFinWave использует тот же принцип передвижения, что и подводные животные, причем, по признанию разработчиков, движения робота больше похожи на то, как перемещались морские обитатели «сотни тысяч лет назад».

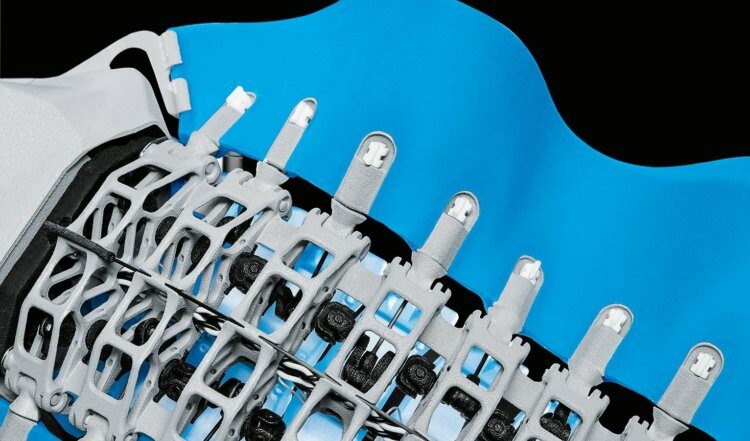
Робот BionicFinWave имеет цельные плавники, изготовленные из мягкого силиконового пластика. А для перемещения используется 2 сервопривода. При этом «тело» робота, подобно морским животным, способно изгибаться, а сам робот может перемещаться не только вперед или назад, а вообще в любом направлении: менять глубину погружения, поворачивать и так далее. Примечательным является еще и то, что BionicFinWave – полностью автономный робот. Ему не нужны тросы или кабели питания. Заряда аккумуляторной батареи хватает на несколько часов работы, а управление осуществляется дистанционно с берега, корабля или подводной лодки.
Однако несмотря на массу интересных находок, BionicFinWave – это скорее прототип, а не готовое устройство. Дело в том, что компания Festo редко «держит при себе» свои наработки. Другие компании могут взять элементы конструкции и на их основе создавать своих роботов, которые могут использоваться как для наблюдения за подводной флорой и фауной, так и для разведывательных и спасательных миссий.

